


121
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享你好,我在 RS6240-AIP-DEV-BOX 上装了官方的 r3_databox_mrs6240_p2512.img 固件,测试可视化点云的时候发现点云信息与预期不符。
一个是雷达前方没有明显物体的时候,x=0附近还是有很多点;
第二个是就算是人站在了雷达前方,xy平面看也不能明显分辨出人站的位置有目标点云,z轴上也没有明显的可识别特征。
请问是什么原因?硬件问题还是配置问题?环境、效果图如下:
环境:

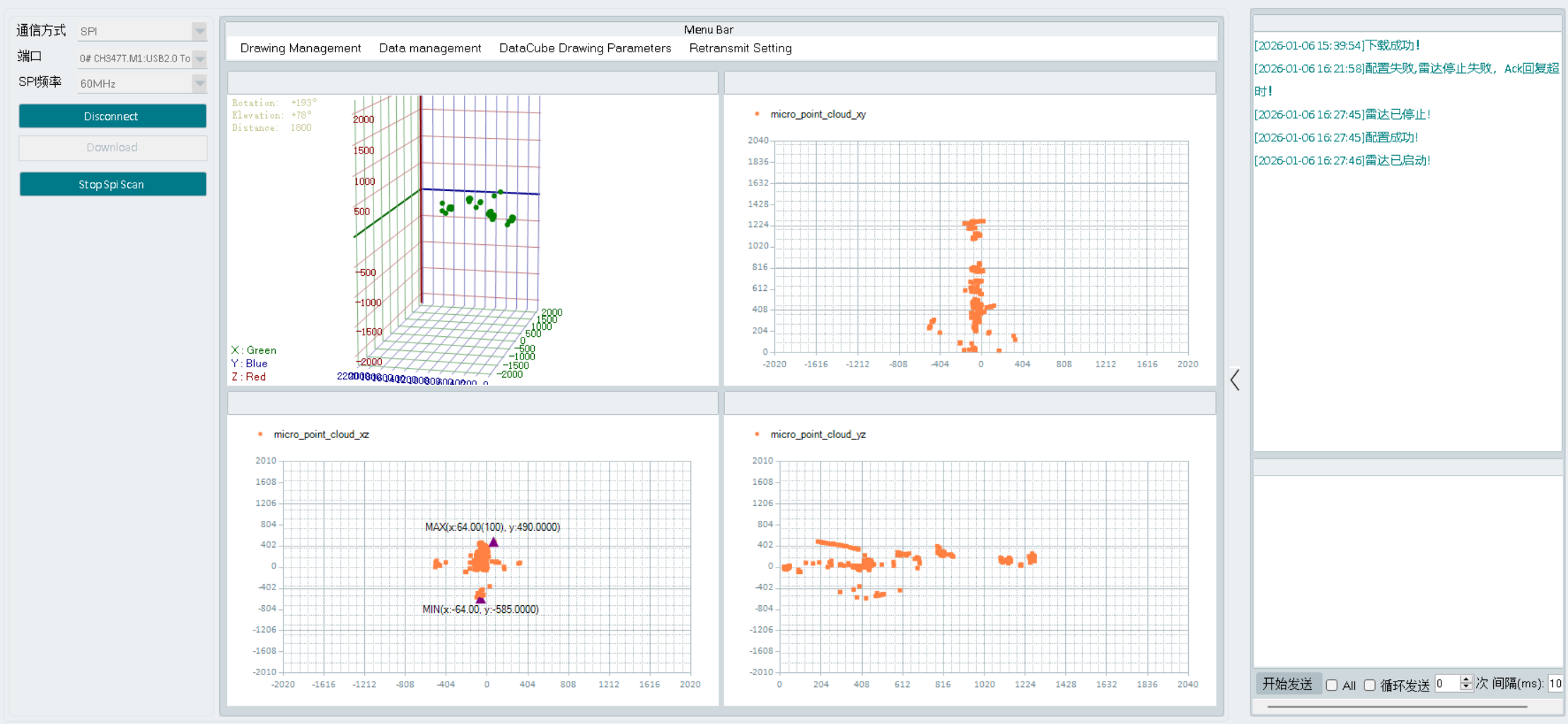
点云结果:

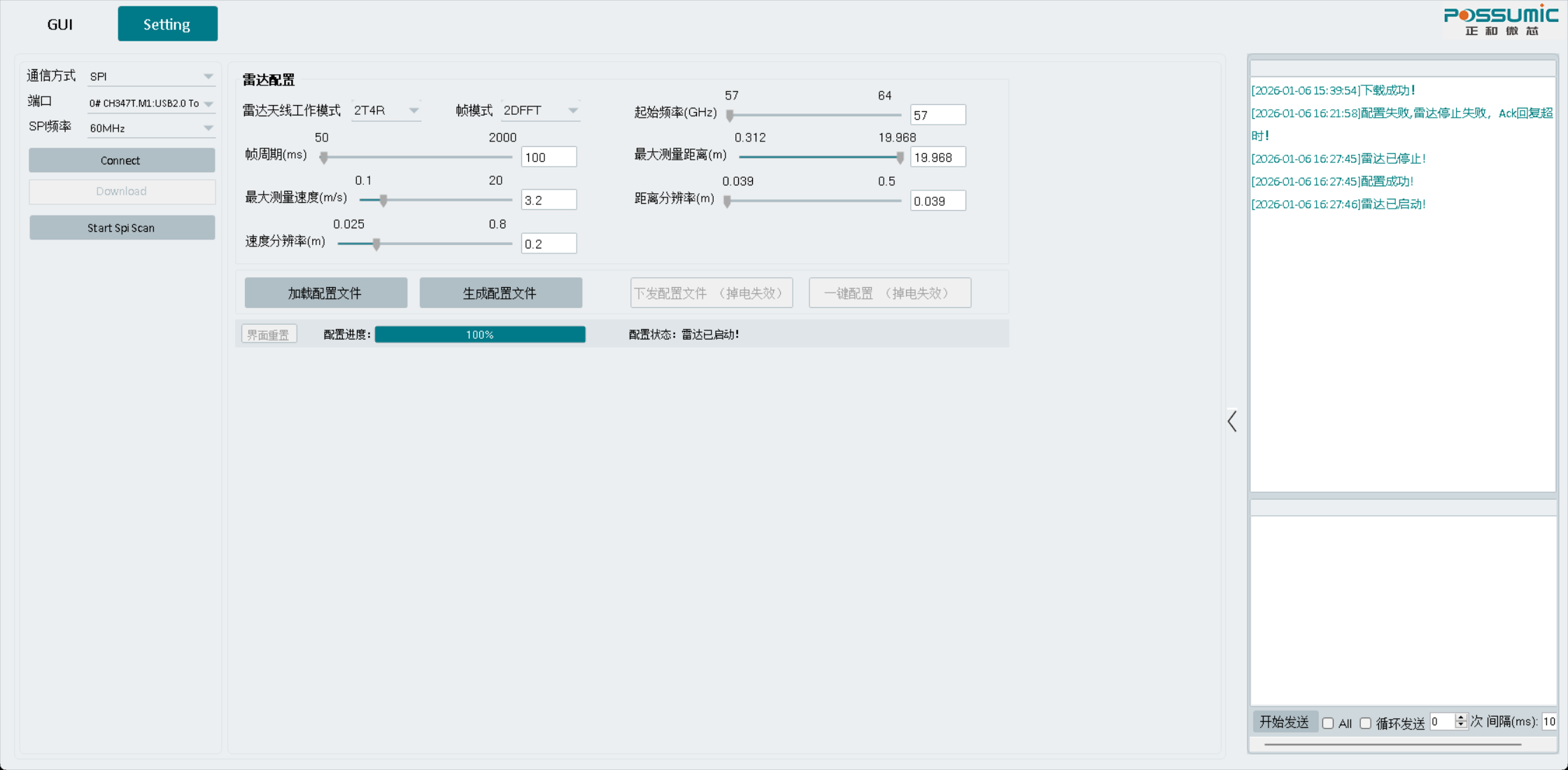
参数配置:

您好,
根据你提供的图来看,视图中的可视化点云为:micro_point_cloud,即微动点云,微动点云对微小移动或震动的目标比较敏感,包括但不限于肉眼可见的移动物体,还包括风扇、空调排风口等容易被忽略的具有微小振动的目标。若要观察明显的移动物体,建议观察:motion_point_cloud。
对于配置方面:图中所给出的距离FFT点数为512,多普勒FFT点数为32,建议在配置时,距离FFT点数不超过256,可参考《RS6x_7x_h毫米波雷达评估_快速入门》文档中的3.1,3.2节



