

92
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务[代码链接](https://github.com/Tipriest/vln_simulator)
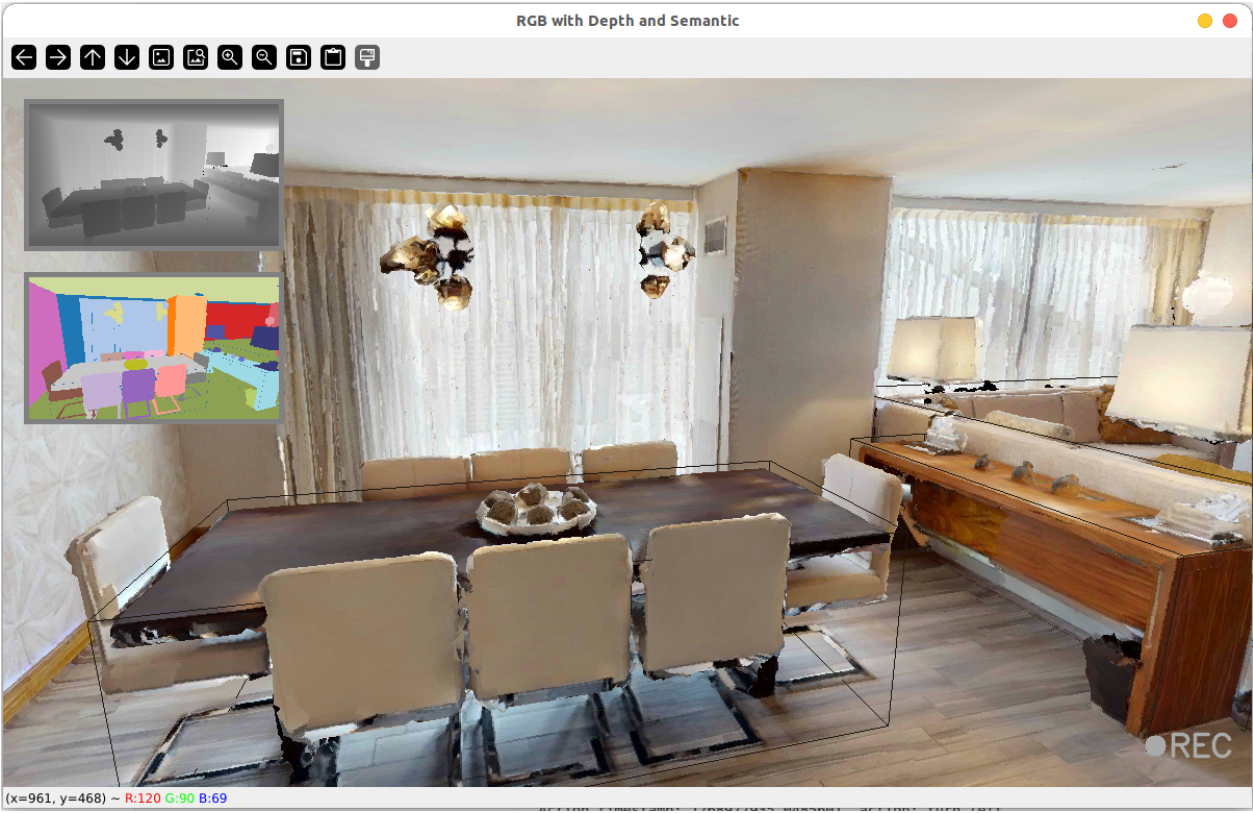
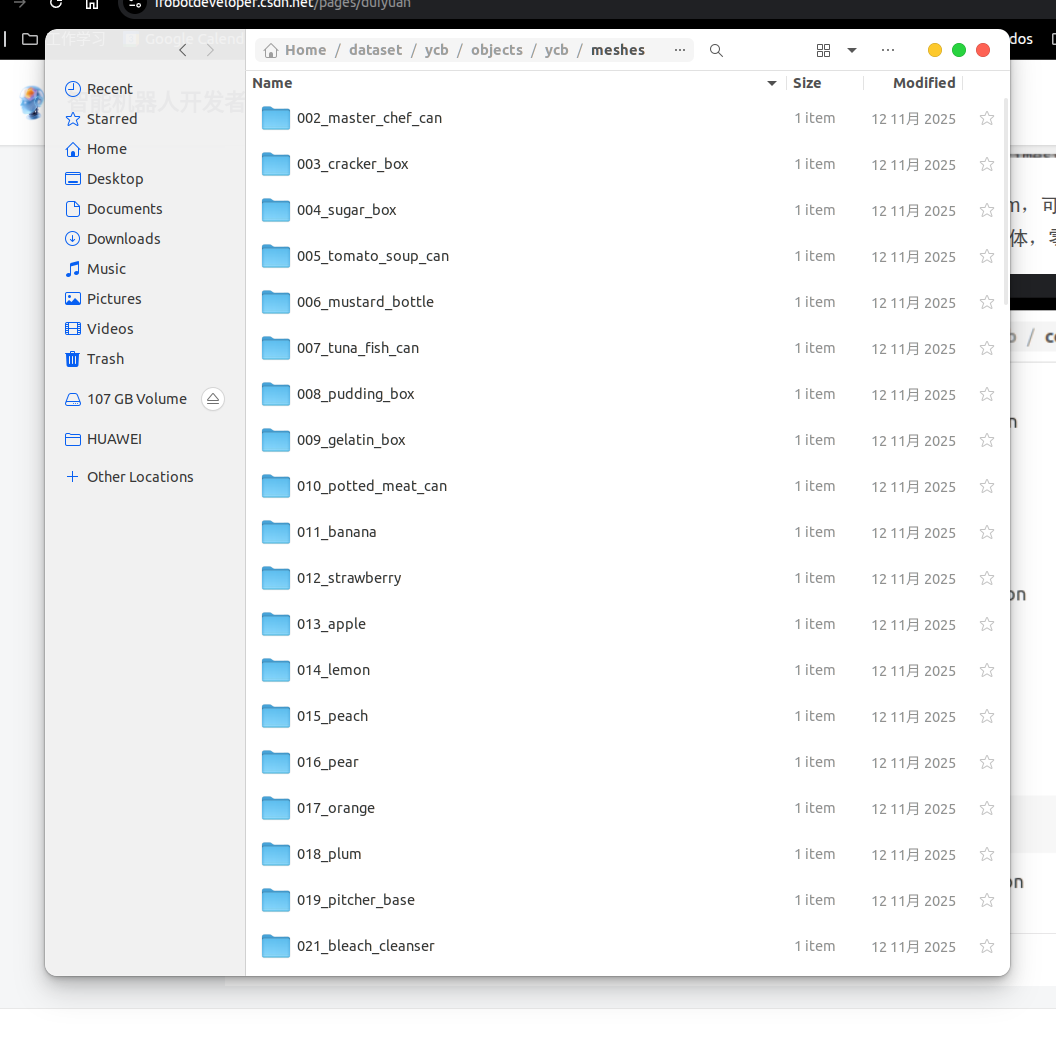
分享一下我们所使用的室内导航寻物的仿真环境,环境基于Meta AI的Habitat-sim,在[habitat-data-collector](https://github.com/Eku127/habitat-data-collector)的基础上进行了一定的更改,可以加载不同的数据集,如上图所示加载了HM3D数据集的00829环境,还可以加载MP3D和Replica数据集的仿真场景,可以在场景中自由加载一些指定的零散物体,零散物体使用Google的YCB数据集,有如下所示的大致70+的常见物体
仿真器的整体功能如下所示:
用于作为一个简单的室内环境的仿真器平台
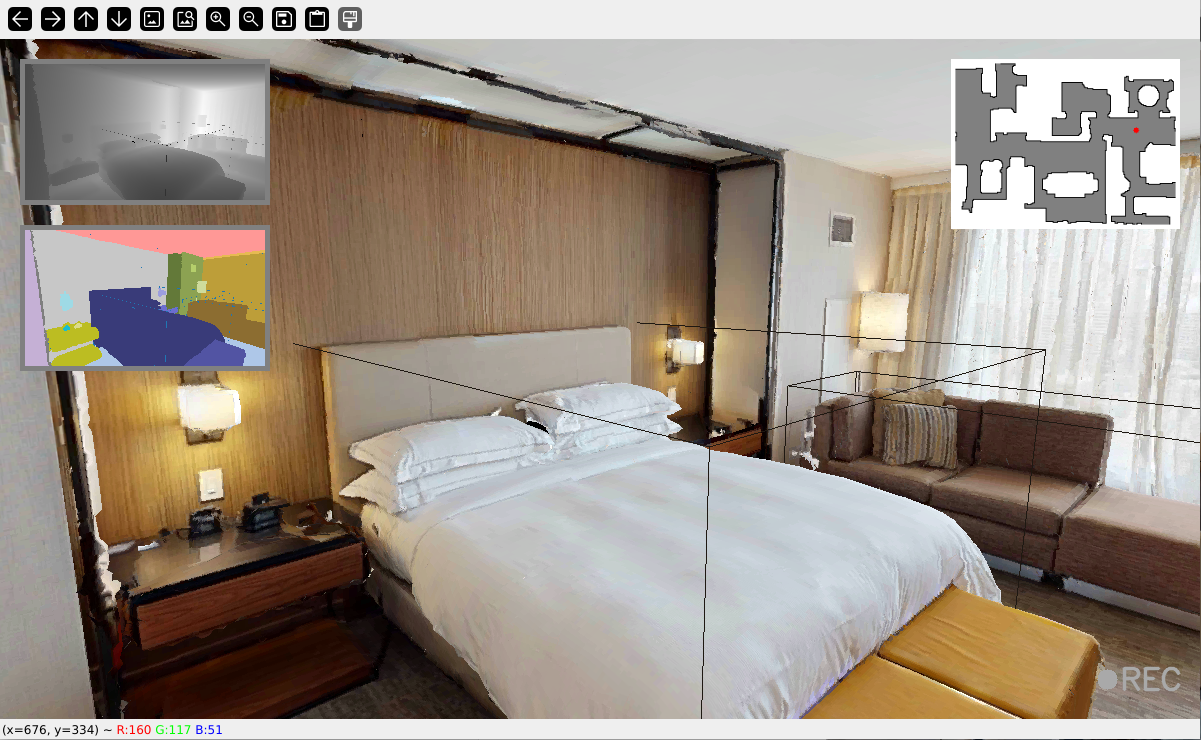
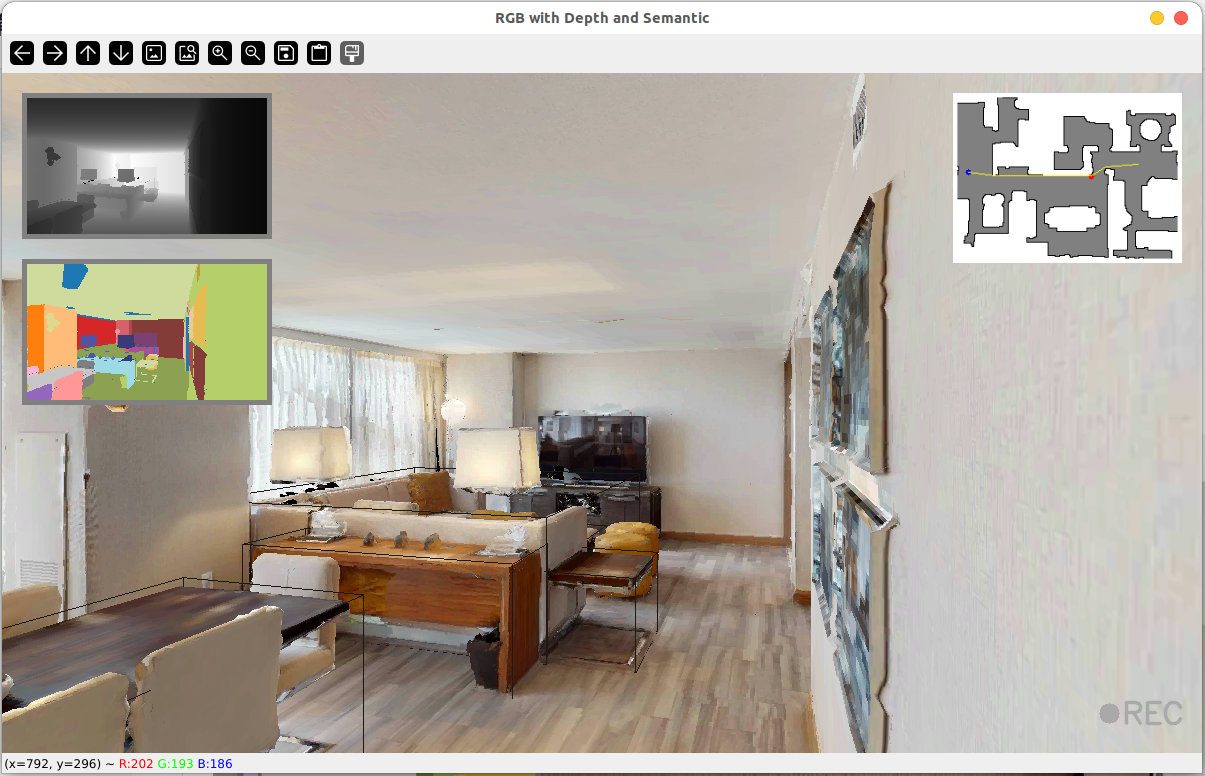
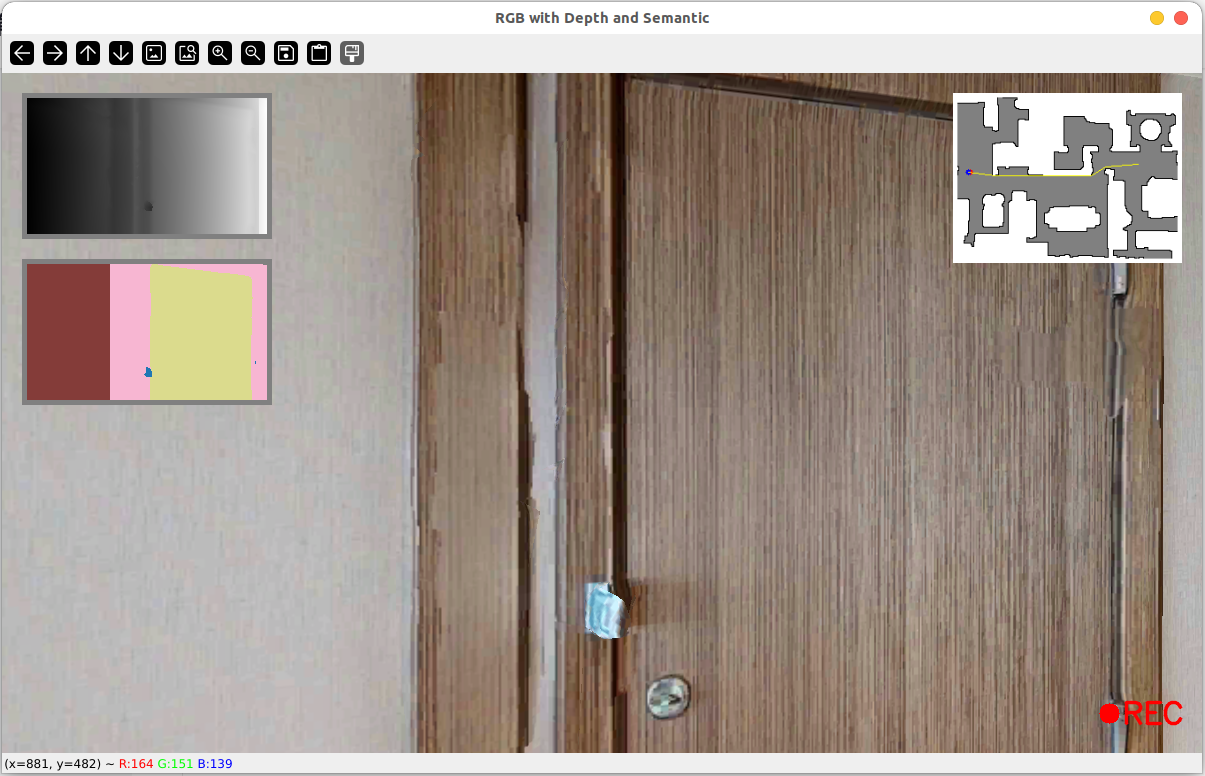
如下图所示,可以加载小地图,查看一个整个环境的Map信息以及自己所处的位置,
可以在地图上随机选一点,机器人生成通行路径到达指定位置
仿真环境本身可以发布ROS话题:
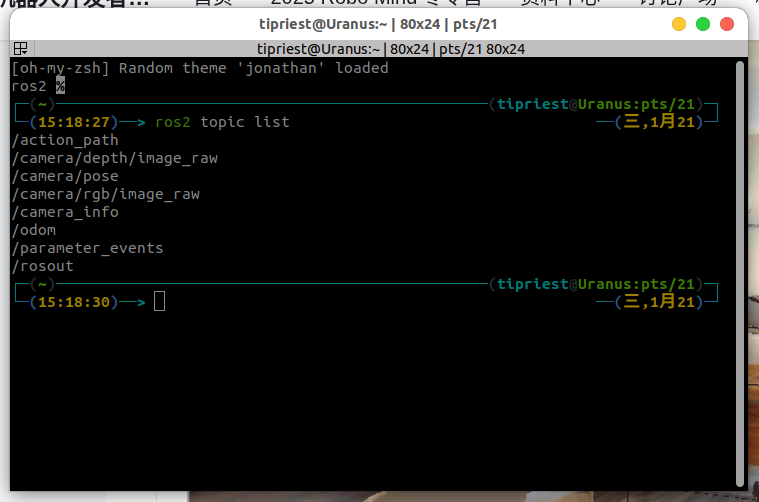
也可以自主录制ROS数据包
录制好的数据包在正常结束项目后会生成在代码的根目录下。
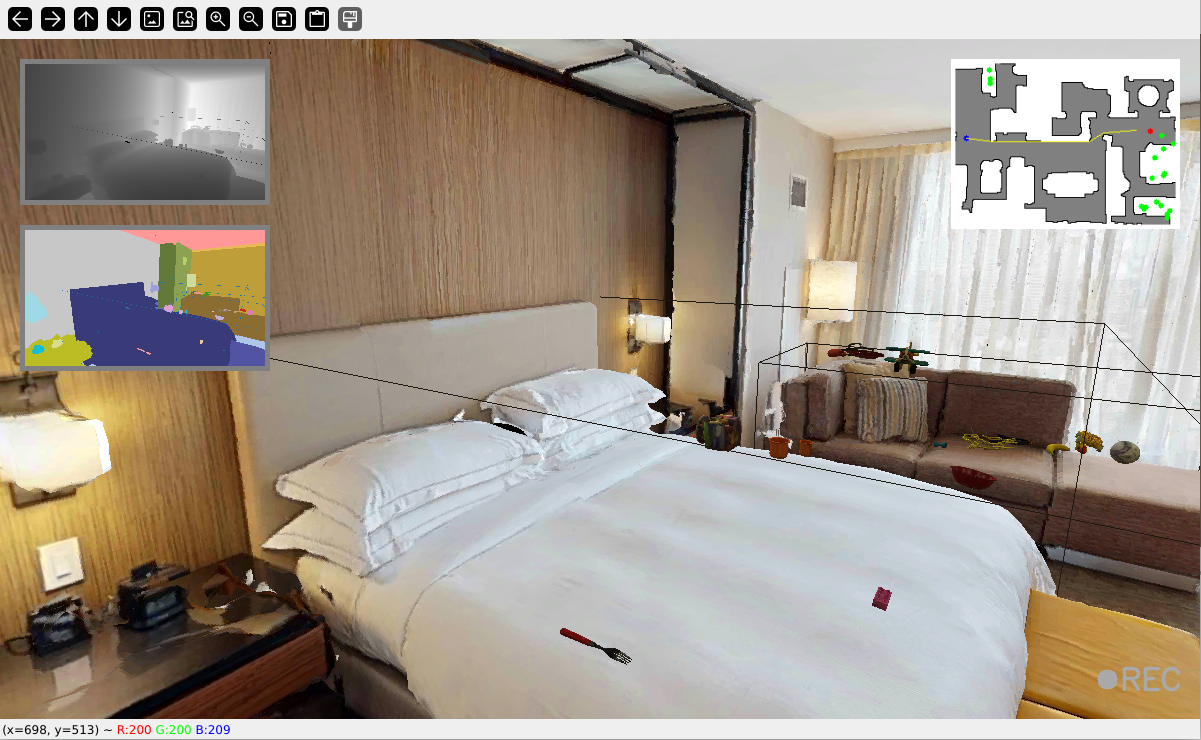
如下所示,可以在床上和沙发上放置一些YCB物体,可以用来作为导航寻物的目标:

感谢分享

感谢分享
很有帮助!
牛的

很有帮助!

感谢分享!
92
社区成员
发帖 与我相关 我的任务

加载中
「智能机器人开发者大赛」官方平台,致力于为开发者和参赛选手提供赛事技术指导、行业标准解读及团队实战案例解析;聚焦智能机器人开发全栈技术闭环,助力开发者攻克技术瓶颈,促进软硬件集成、场景应用及商业化落地
试试用AI创作助手写篇文章吧