

92
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
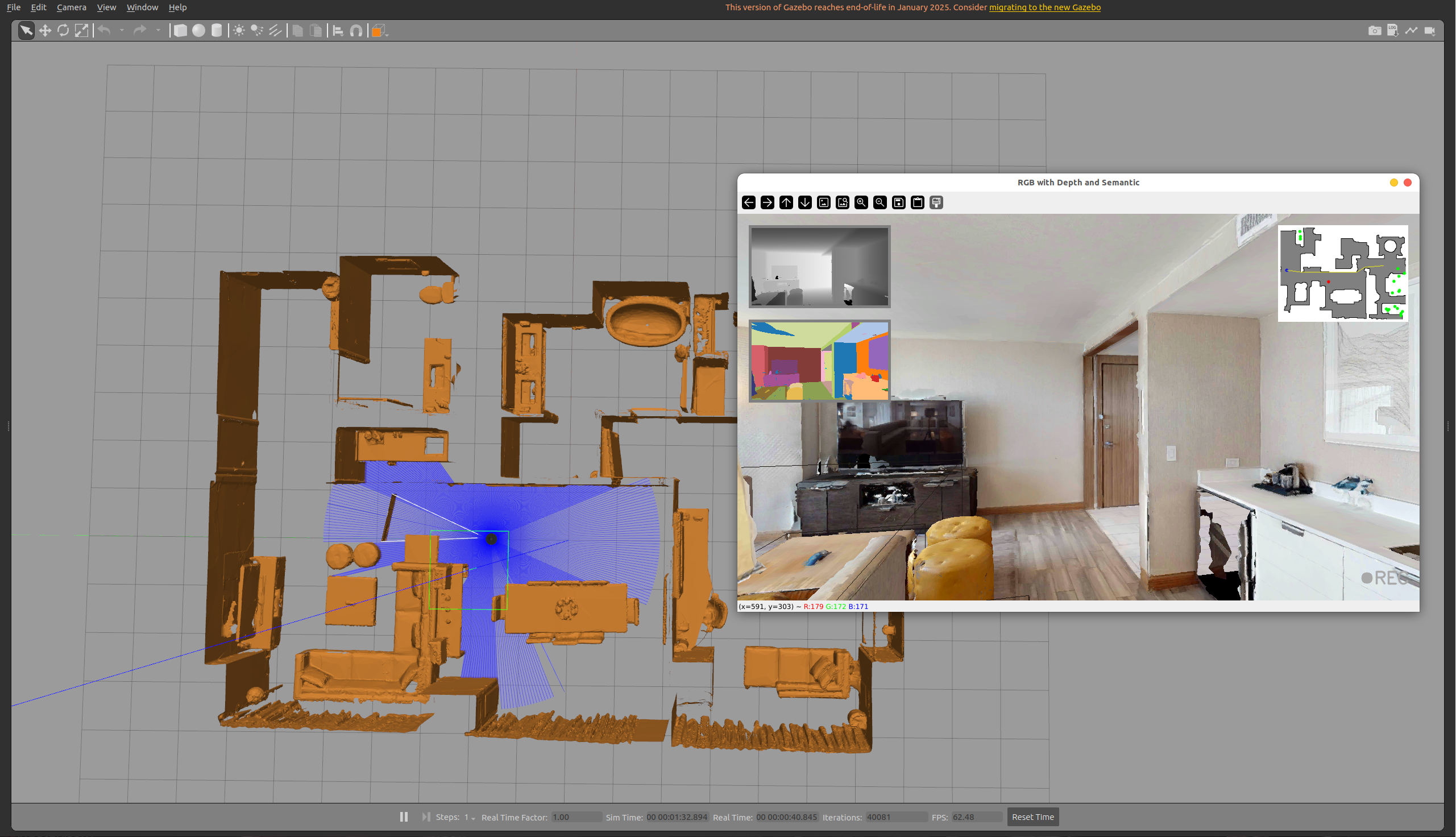
我的任务上一篇文章写了基于Habitat的导航寻物环境仿真器,可以为机器人提供丰富的语义信息,但是机器人的底层和我们所使用的机器人仍有较大差距,比如使用Arrow的上,下,左,右来控制机器人的运动,或者使用ROS的直接的路径点来控制机器人的运动,这样的控制方式仍然与底层不够贴合,因此,我们使用了合Gazebo与Habitat的联合仿真的形式,在Gazebo与Habitat中使用相同的地图,使用机器人在Gazebo中的位置直接同步到Habitat-sim上,相当于使用了Gazebo的动力学和Habitat的语义信息,进而达到更完善的联合仿真的目的:
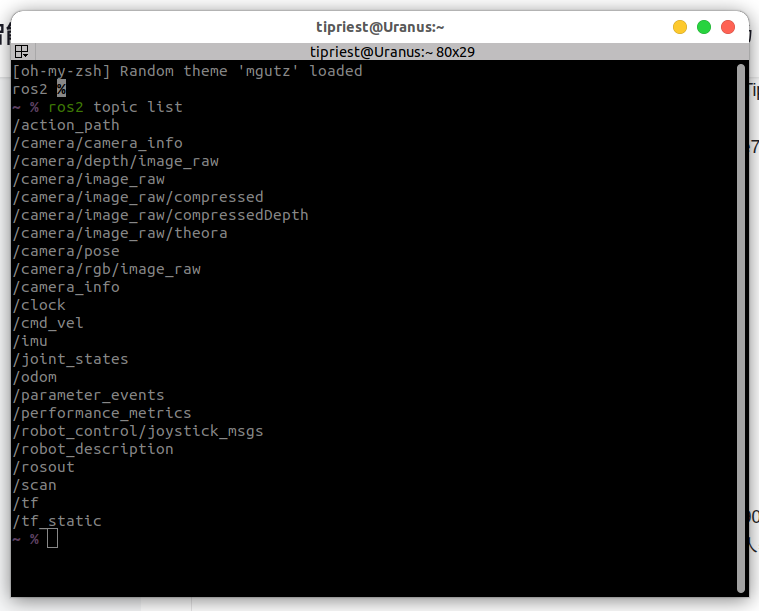
基于Gazebo的仿真环境代码
基于Habitat的仿真环境代码
手柄代码(这个代码也可以直接控制xilong机器人)
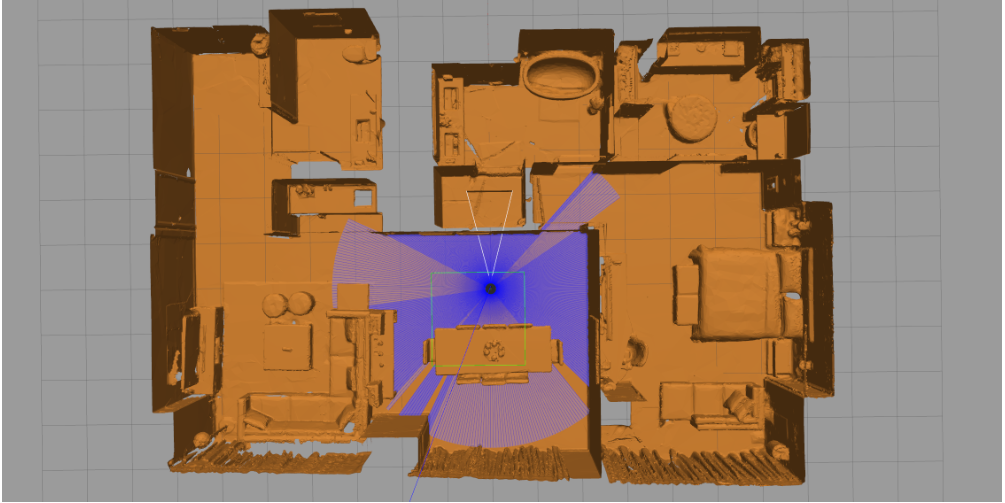
分别启动gazebo和habitat仿真环境之后,如下所示:

感谢分享

感谢分享
感谢!
感谢!
牛的!


很有帮助!

感谢分享!
92
社区成员
发帖 与我相关 我的任务

加载中
「智能机器人开发者大赛」官方平台,致力于为开发者和参赛选手提供赛事技术指导、行业标准解读及团队实战案例解析;聚焦智能机器人开发全栈技术闭环,助力开发者攻克技术瓶颈,促进软硬件集成、场景应用及商业化落地
试试用AI创作助手写篇文章吧