

1,151
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享我fast-lio发出的坐标系是odom到base_link(imu所在位置,也就是我把imu认为是小车中心),然后base_link到imu和lidar的tf都存在,在自主探索程序里面,我又加了一个odom与base_link之间的等效静态变换。现在的坐标变换变成这样子。然后,sensor_scan_generation里面的所有/map我都改成odom了(实际上改不改都无所谓,好像没影响)。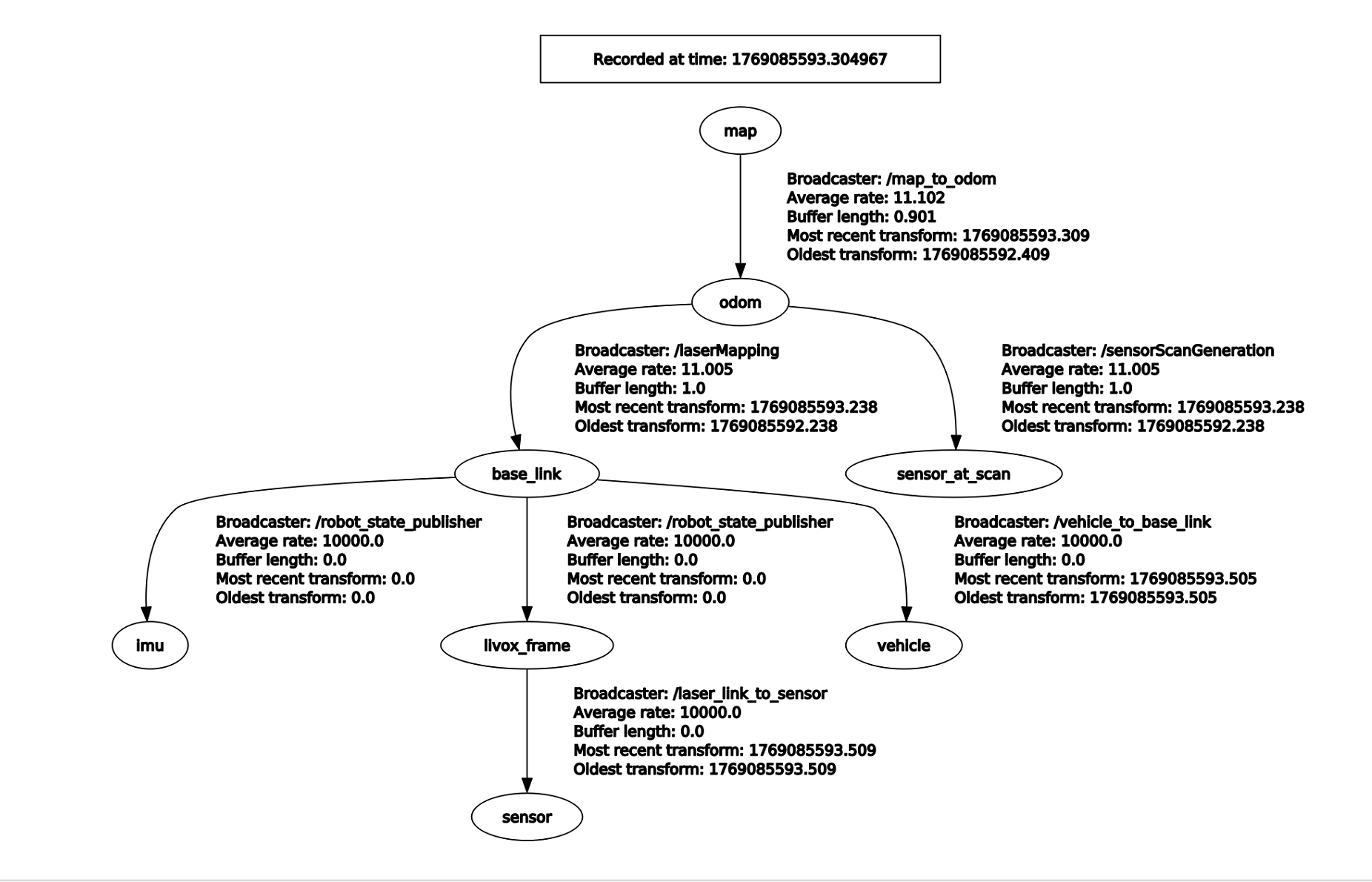
,我的疑问主要就是这个:径规划自主探索里面的坐标系原点到底是哪个呢,是基于哪个坐标系来运行的呢,我自己把自己都搞混了 ,实在不太明白。

我现在测完是都转到map坐标系下
