

92
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
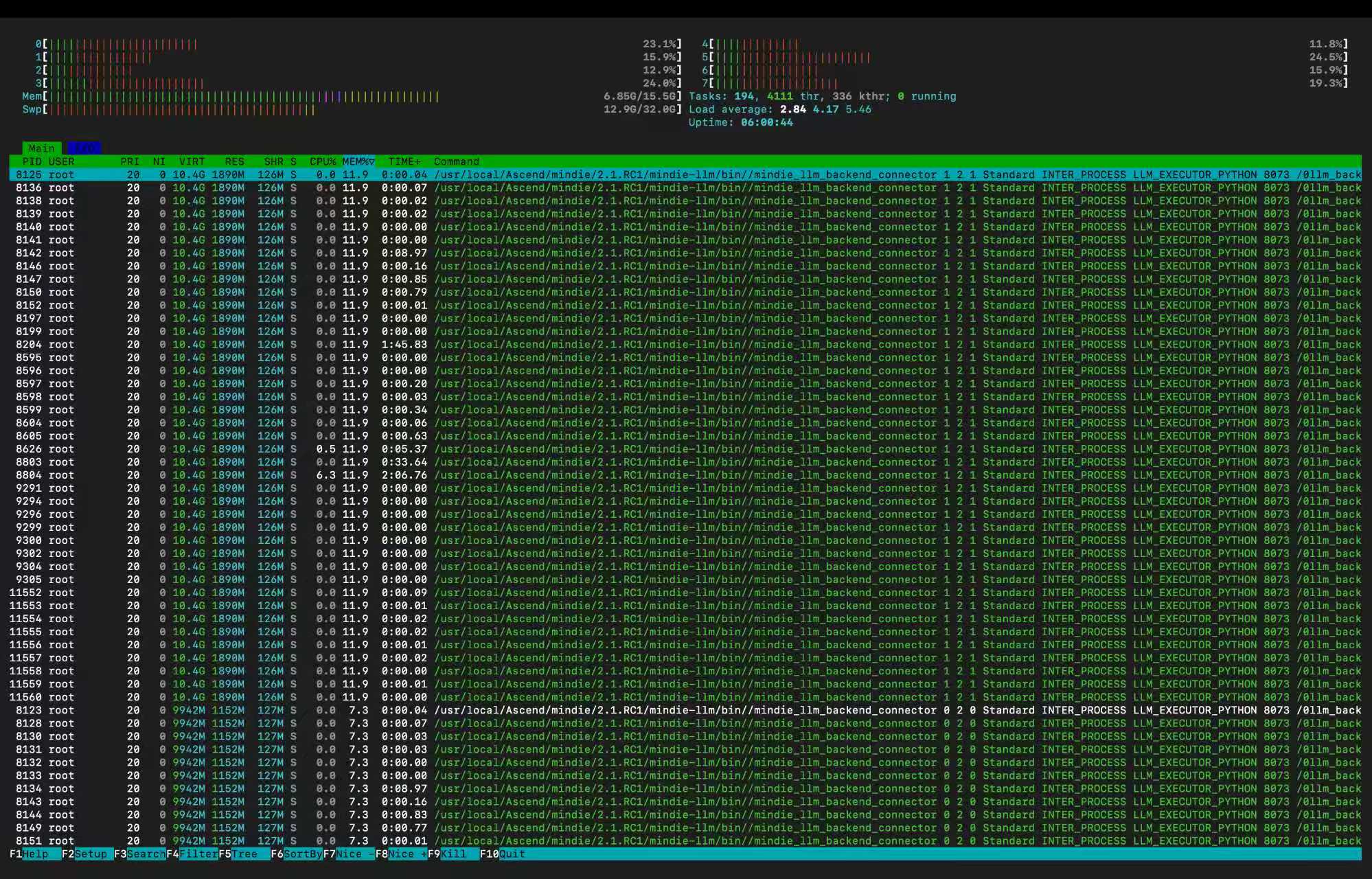
我的任务在OE系统中使用htop命令监察资源展示如下表格,ROS2节点为逐步启用,与满负荷可能有差别。
| 进程 | CPU负载 | 内存占用 |
|---|---|---|
| mindIE(彻底启动后) | 8% | 6.85G |
| lazer_node | 72.9-90% | |
| pose_node | 30.6-33% | |
| Yolo camera(hz=15) | 21-26% |
除此之外,我们还发现网络带宽波动对导航任务也有影响。这里使用下述指令测试网络带宽。
iw dev wlan0 link
RX(Receive)= 接收:这台设备从网络“收到”的数据
TX(Transmit)= 发送:这台设备向网络“发出”的数据
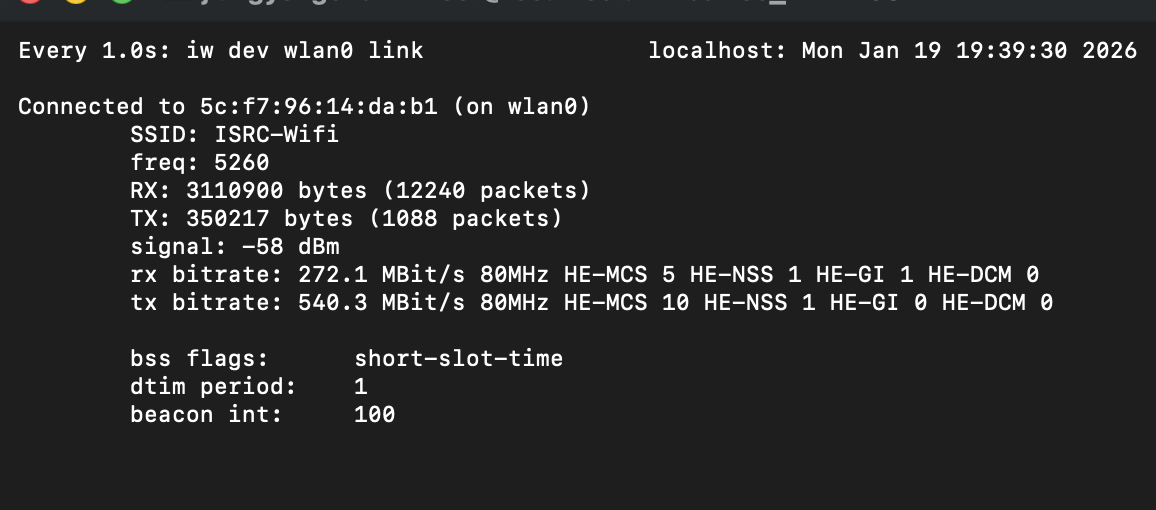
实测数据显示这两个数据至少都上100 M才不会对任务造成影响。最高速率测得为600+Mib,但不确定是网卡的上限还是本地wifi的上限,期待赛场稳定高速的wifi。

感谢分享

感谢分享!


92
社区成员
发帖 与我相关 我的任务

加载中
「智能机器人开发者大赛」官方平台,致力于为开发者和参赛选手提供赛事技术指导、行业标准解读及团队实战案例解析;聚焦智能机器人开发全栈技术闭环,助力开发者攻克技术瓶颈,促进软硬件集成、场景应用及商业化落地
试试用AI创作助手写篇文章吧