社区
TARE机器人自主导航系统
Tare提问专区
帖子详情
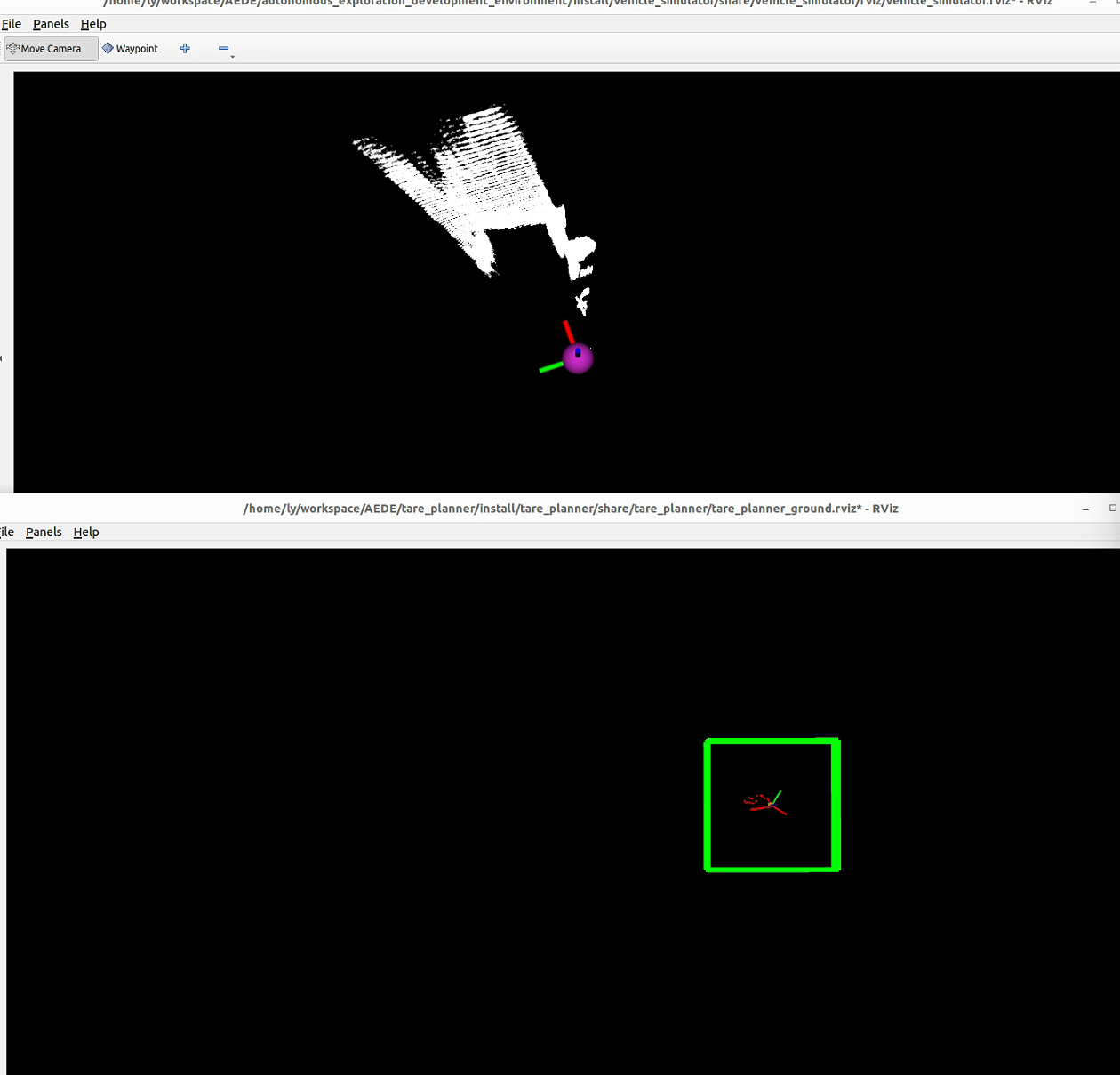
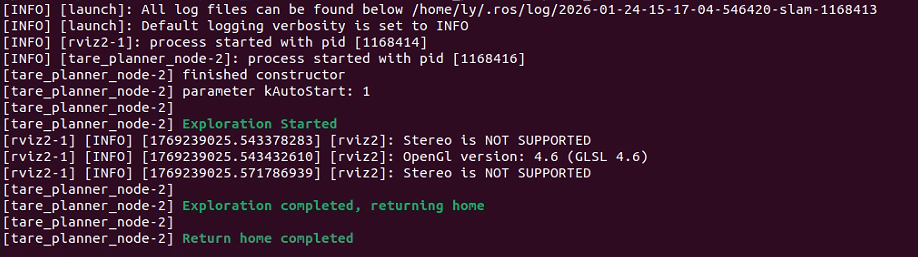
RGBD相机适配探索,是不是探索范围默认是360度视野范围,RGBD相机视野大概90°,探索一开始就结束
ly74lehi
2026-01-24 16:17:48
...全文
379
回复
打赏
收藏
RGBD相机适配探索,是不是探索范围默认是360度视野范围,RGBD相机视野大概90°,探索一开始就结束
[图片]
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
ROS1--辟机器开源之荒途
简单来说在机器人领域中不同的机器人有不同的结构,总体虽然不一样,但是采用“模块化,分布式”的思想就可以将机器人分解成通用模块(雷达、双目、
相机
……)所以可以理解为ROS就是机器人界的安卓;ROS中的各种节点就相当于各种手机的app,任何可以用单片机控制的模块都能用ROS来实现;1、启动终端:简单的有两种方式,第一种:在左下角的显示应用程序里直接打开终端,第二种:使用快捷键ctrl+alt+t来调出来终端。显示出来像下边图片中的窗口就恭喜你会启动linux系统的终端了!!!2、对文件进行操作:查看当前文件夹的
易语言源码最终优化限制使用时间源码
易语言源码最终优化限制使用时间源码
国有企业如何利用数据分析强化科技自强能力?.docx
科易网基于40亿+科创知识图谱数据库,深
度
探索
AI技术在技术转移、成果转化、技术经纪、知识产权、产业创新、科技招商等垂直领域的多样化应用场景,研究科技创新领域的AI+数智化解决方案,推动科技创新与产业创新智能化发展。
结合循环系统中不同摩尔分析的绝热和非绝热燃烧室建模,适用于各种烃类燃料和进气空气.zip
1.版本:matlab2014a/2019b/2024b 2.附赠案例数据可直接运行。 3.代码特点:参数化编程、参数可方便更改、代码编程思路清晰、注释明细。 4.适用对象:计算机,电子信息工程、数学等专业的大学生课程设计、期末大作业和毕业设计。
stm32单片机项目资料课程设计文档C语言程序代码原理图电路PCB实例使用PWM得到精密的输出电压
stm32单片机项目资料课程设计文档C语言程序代码原理图电路PCB实例使用PWM得到精密的输出电压
TARE机器人自主导航系统
1,152
社区成员
453
社区内容
发帖
与我相关
我的任务
TARE机器人自主导航系统
社区内分享我们的开源平台tare机器人自主导航系统,希望能帮助所有自主移动机器人领域的研究人员快速搭建出属于自己的,稳定可靠的机器人仿真和实验的平台,更快进入自己的研究领域
复制链接
扫一扫
分享
社区描述
社区内分享我们的开源平台tare机器人自主导航系统,希望能帮助所有自主移动机器人领域的研究人员快速搭建出属于自己的,稳定可靠的机器人仿真和实验的平台,更快进入自己的研究领域
自动驾驶
人工智能
企业社区
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享