无人环境下为何始终有距离输出
您好,可能是您烧录的是存在检测固件,环境有强反射导致检测到有目标,如果确实是存在检测固件可以按《MRS2xx_毫米波传感器Demo_指导手册》指导进行环境学习看看是否还有此问题。
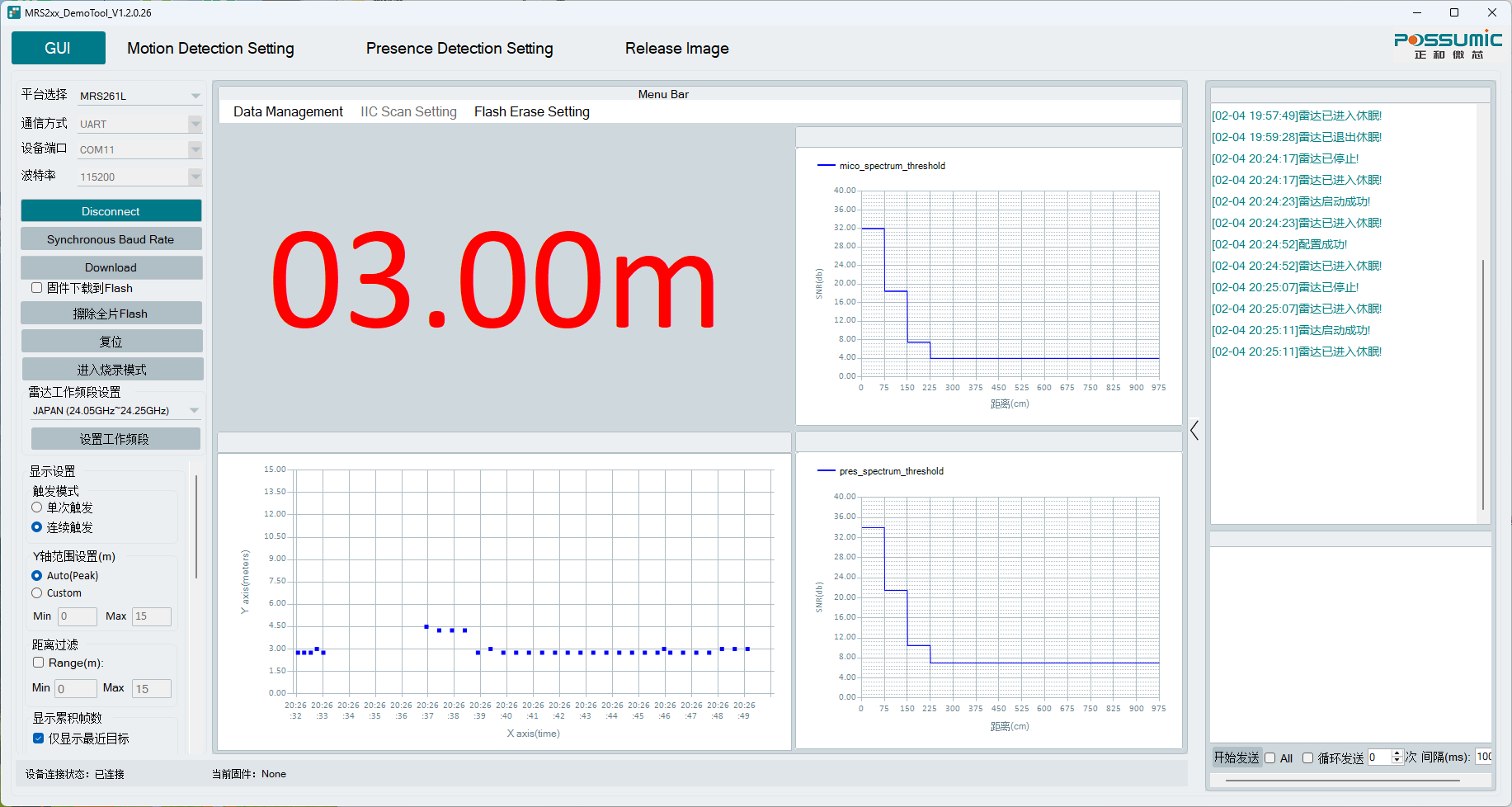
如果我的猜测有误,麻烦您提供固件型号、下载的img名字、以及贴一份配置图作为补充说明,让我这边能更好为您提供帮助
135
社区成员
226
社区内容
加载中
试试用AI创作助手写篇文章吧



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

