163
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
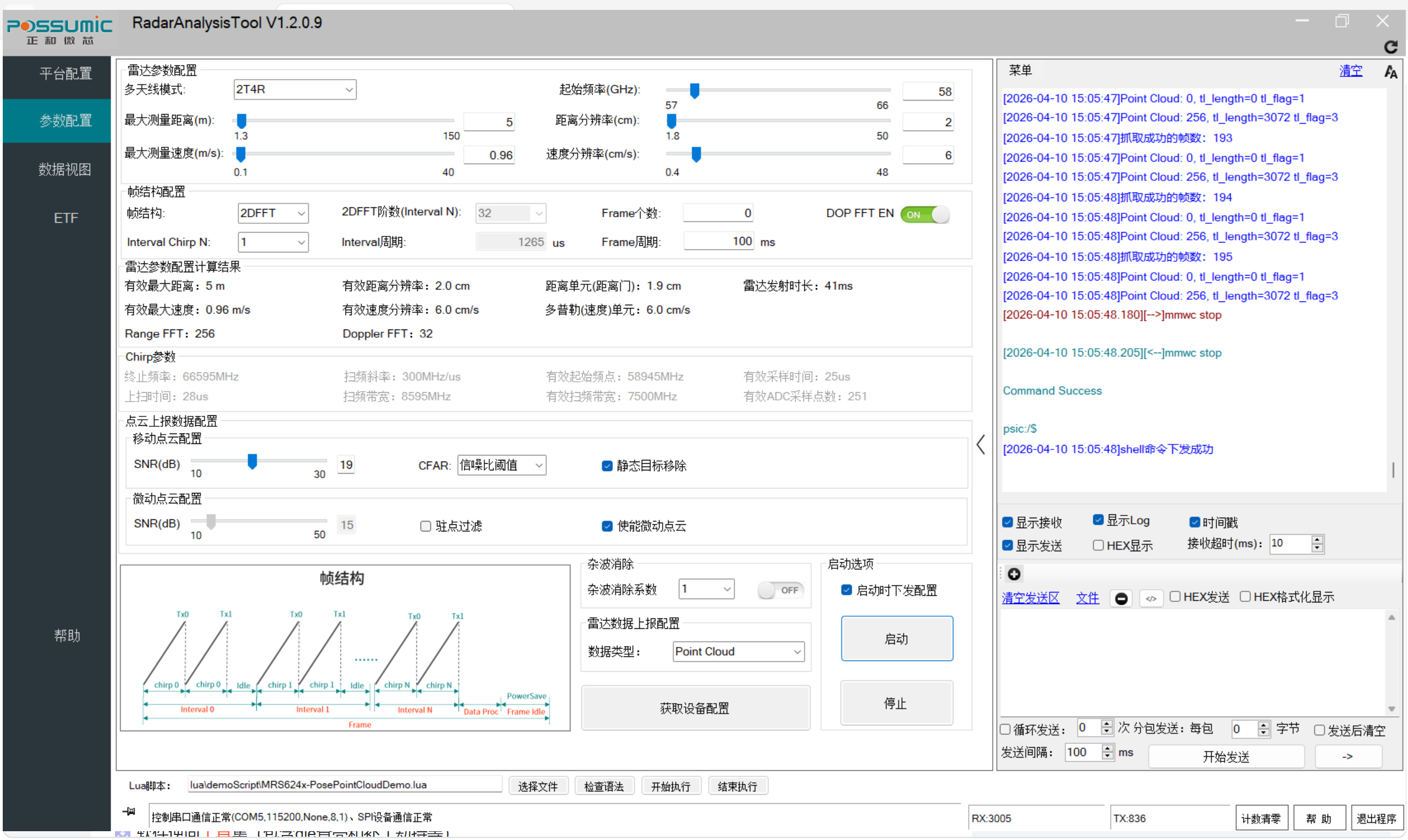
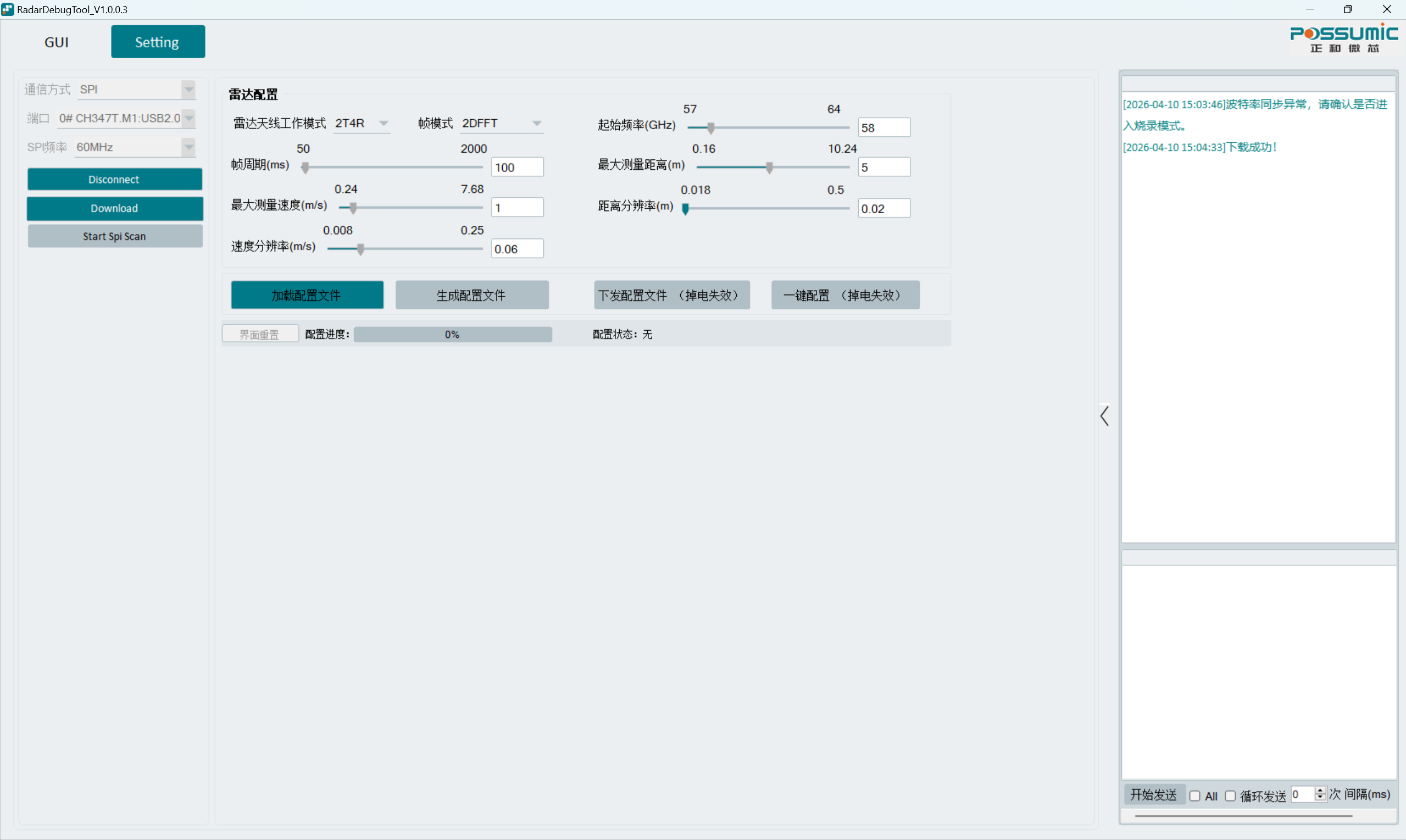
分享我在analysis收集数据后,现在发现,相同的参数配置在差不多的场景下,debug工具输出的点云信息大不一样,甚至连一点的人体轮廓都看不出来,下面正常来讲,motion点云是不会有的,因为前面并没有移动的物体,在analysis上是空的,但是这里debug反而有这么多固定的点。总之就是,如何让analysis和debug工具输出对称,相似的动作可以输出相似的点云数据。
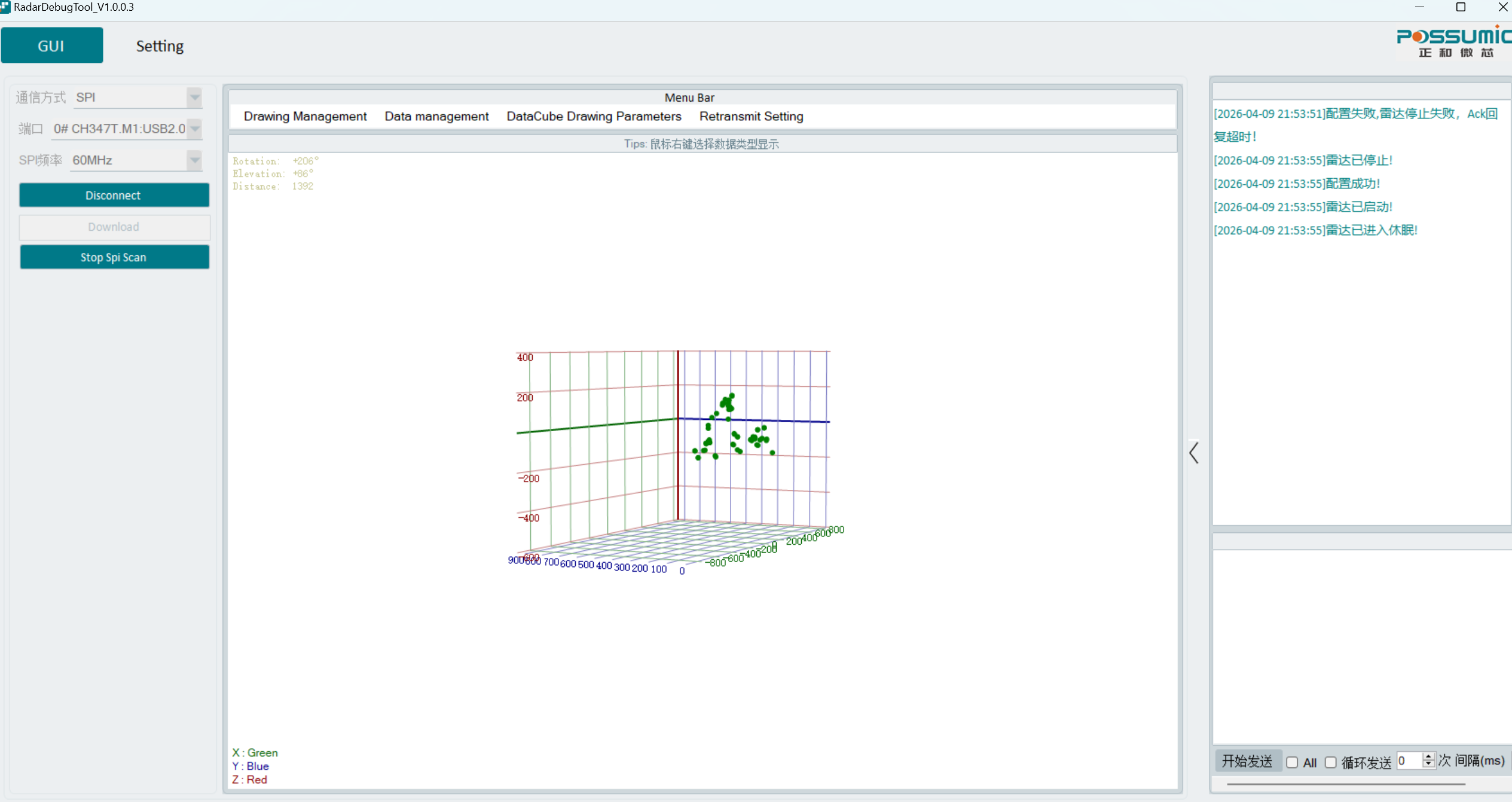
另外,直接使用debug工具,不管怎么调雷达参数都是达不到analysis工具那个效果,这样的话,我训练出来的模型就用不了啊
补充: