



195
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
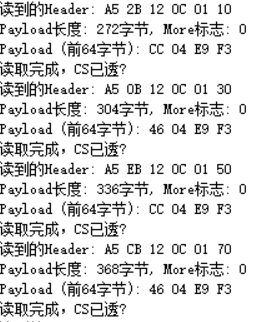
分享在r3_databox例程中,将目标点云上传以及增益上传都关闭,只上传微动点云(同时datacube的宏以及fft数据上传到宏关闭),得到的数据长度为图片中所示不断循环(272,304,336,368字节)不断循环,而打开目标点云和增益上传后,收到的数据长度为304,368字节不断循环,这是一种正常现象吗,我在图片中注释掉r3_databox_upload_gain_factor_process()和r3_databox_point_cloud_upload()这两个函数可否实现我的目标功能(只上传微动点云)



你好:
注释掉r3_databox_upload_gain_factor_process()和r3_databox_point_cloud_upload()可以实现你的目标。
同时建议您修改后使用RadarDebugTool确认是否可以正常显示微动点云。
单从接收的字节数来看,接收可能有点问题,我把此问题转给我们HOST开发同事帮助您确认。

这是不是和我发送的poll帧有关系,更改poll帧后字节数就飙升至2000+
更改前帧头:0xA5,0x35,0x15,0x0C,0x04,0x00,0x02,0x00,0xFF,0xFF,0xE8,0xF3,0xFC,0xFE
更改后帧头:0xA5,0x35,0x15,0x0C,0x04,0x00,0x02,0x00,0x2D,0x00,0xE8,0xF3,0xCE,0xFF


