1,150
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享首先感谢各位大神的开源工作,在进行实际调试的时候遇到了几个问题,想请教一下:
我们用的底盘是husky A200四轮式底盘(是可以原地转向的),Path使用的文件也是默认文件,文件默认是给了7条主路径,然后每条主路径又根据朝向不同各有分支,但是会出现一种情况,就是在选择路径的时候,仅能选择第一段路径的中间三个朝向(左一 中 右一),在选择左二(三)、右二(三)等朝向的时候,机器人会出现“卡死”的情况,也就是不能转弯也不能前进,cmd_vel话题停止输出,这是怎么一回事呢?已经确认没有开启dirToVehicle。
在实际使用的过程中,发现仅有第一段轨迹分支对机器人行走有直接有影响,感觉后续的两段并没有对导航起到实际作用?这样的话是否只生成第一段路径即可呢?
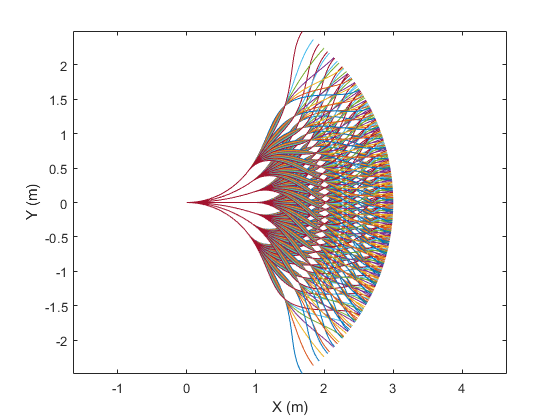
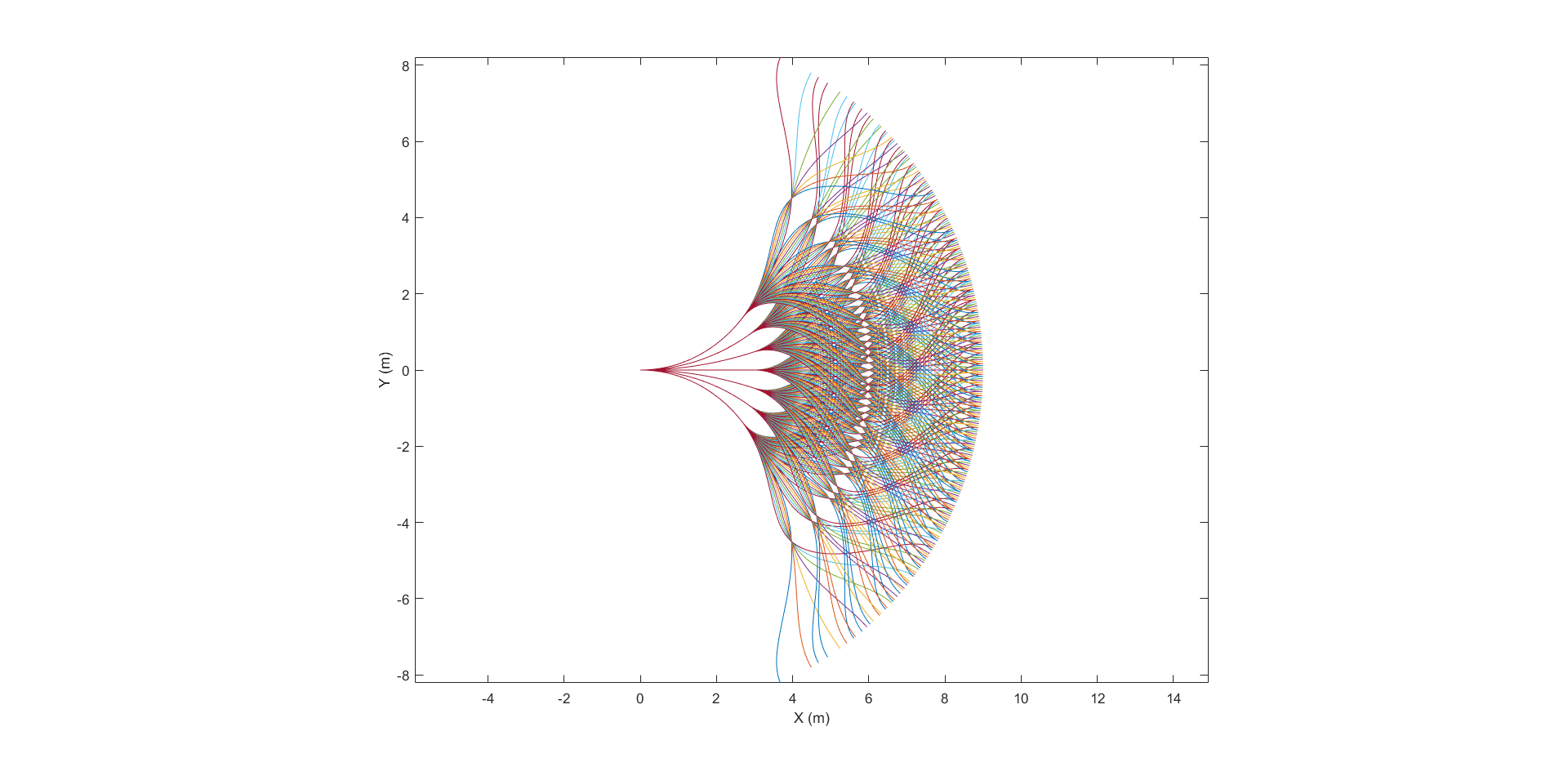
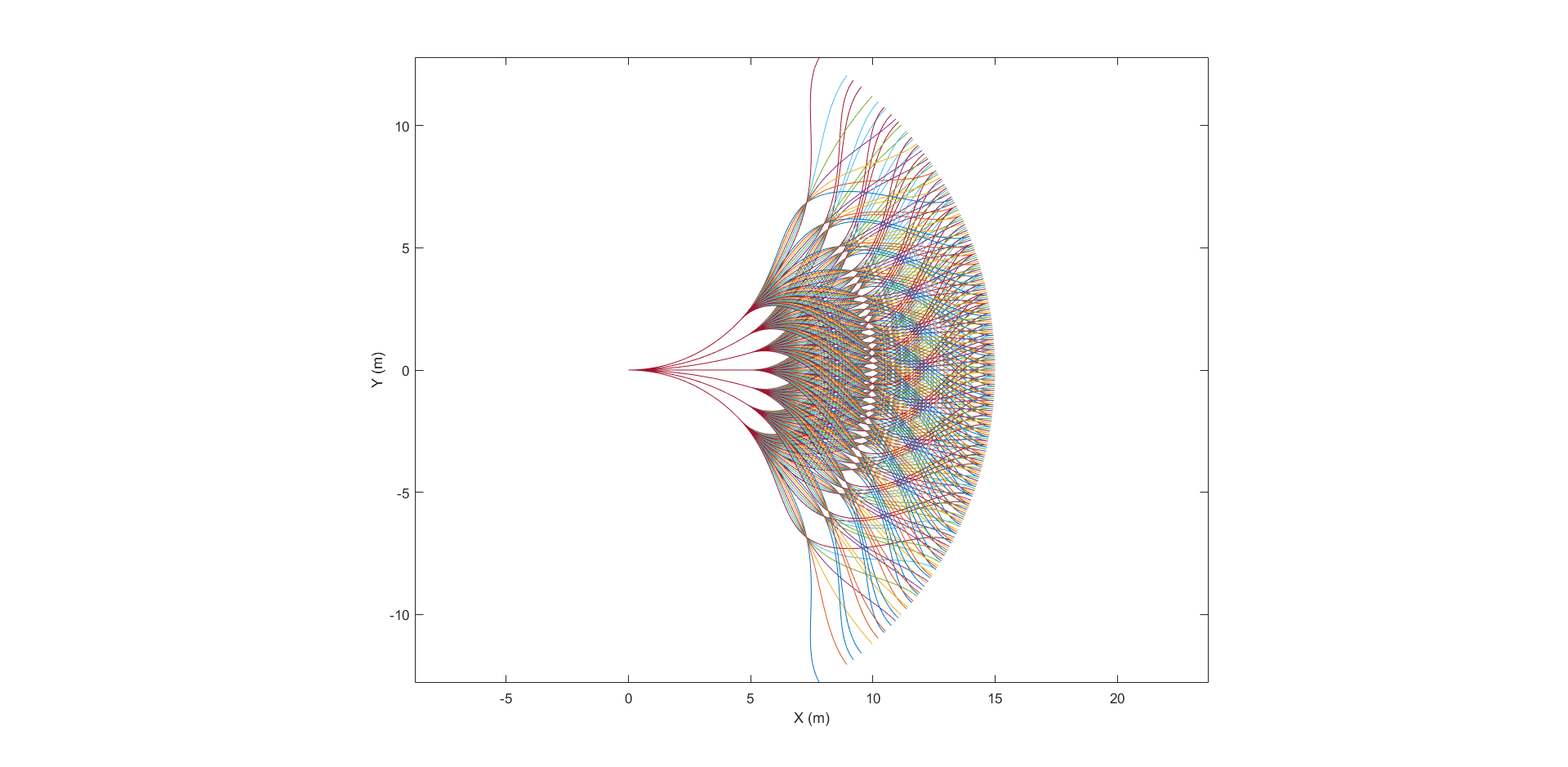
对于path_generator来说dis参数直接影响到生成路径的尺度(或者说分辨率),是不是分辨率越高导航效果越好呢?我们在实验中发现dis设定越大导航的精度就越差,而按照原始dis=1的查找表进行导航效果就很好。下面三图的参数分别为:1-27-0.65(好),2-27-0.65(一般),5-27-0.65(差,近乎不转弯,且到达目标点附近时直接越过目标点继续前行)。