315
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享| 这个作业属于哪个课程 | 软件工程实践-2023学年-W班 |
|---|---|
| 这个作业要求在哪里 | 团队作业—beta冲刺+事后诸葛亮 |
| 这个作业的目标 | 共享之舟——β冲刺Day6 |
| 其他参考文献 | - |
查缺补漏,完成前台店铺的评论界面以及评论举报页面,同时完成前后端的对接。
完成前台我卖出的页面,同时完成前后端对接。
预计时间:3h
花费时间:3.5h
提交记录
本人为用户CapDCC

结果展示
完成个人店铺界面的评论界面
完成个人店铺界面的评论界面的举报评论
在完成个人店铺的评价界面时,出现了报错提示获取不到数据,检查后发现补充的为null的商品数据出现了该问题,最后解决方法为在代码中为null的数据进行处理。
暂无
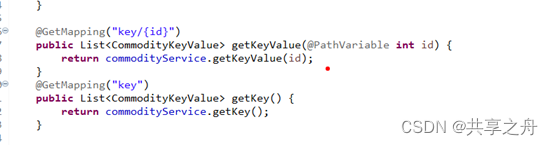
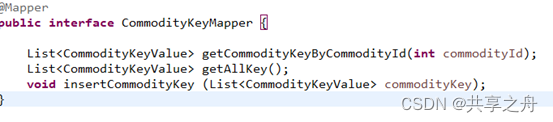
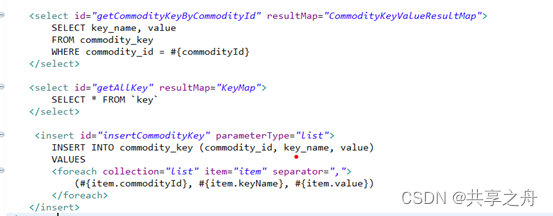
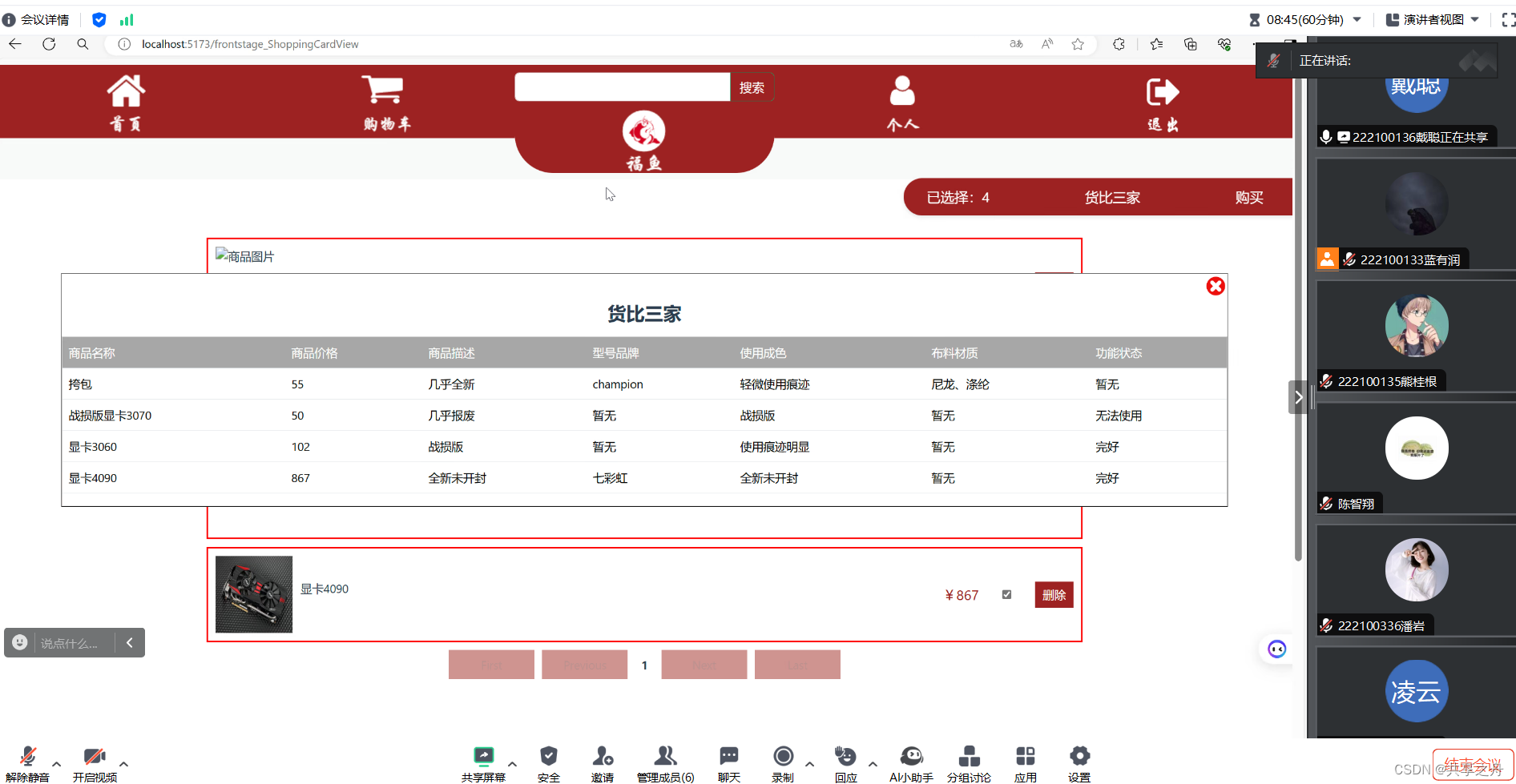
编写后端接口——货比三家接口
与前端对接接口——对接了货比三家
预计时间:3.0
花费时间:3.0
提交记录

结果展示
目前,在后端开发过程中,代码实现本身并没有遇到太大的挑战。然而,在与前端团队的协作中,我们遇到了一些耗费时间的问题,主要是在对接过程中出现的bug。这些问题可能源于几个方面:首先,后端提供的数据结构可能比较复杂,这给前端团队的理解带来了一定的难度;其次,前后端团队对于数据格式的预期可能存在不一致,这也导致了对接时的误解和沟通成本。为了解决这些问题,我们需要加强团队间的沟通,确保数据结构和格式在双方之间有清晰的共识。
对接剩下接口以及修复bug等
测试
评价界面的前后端集成测试、购物车界面的前后端集成测试
预计时间:2.5h
花费时间:2.0h
结果展示
暂无
制作PPT,准备答辩,完成最后的测试
测试
评价界面的前后端集成测试、购物车界面的前后端集成测试、店铺界面的前后端集成测试、搜索界面的前后端集成测试、他人界面的前后端集成测试、举报界面的前后端集成测试
预计时间:4h
花费时间:5h
结果展示

无
完成货币三家的后端部分
测试
举报界面的逻辑覆盖测试、举报界面的接口测试
预计时间:1.2h
花费时间:1.5h
结果展示

暂无
制作用户调查问卷
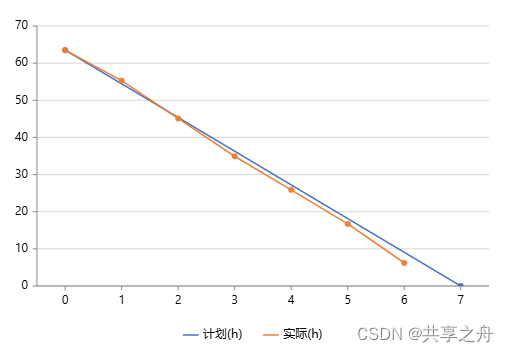
| 完成时间(h) | 总时间(h) | 完成度 | 天数 |
|---|---|---|---|
| 57.3 | 63.5 | 90.24% | 6 |
| 天数(D) | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|---|
| 计划(h) | 63.5 | 0 | ||||||
| 实际(h) | 63.5 | 55.3 | 45.1 | 34.9 | 25.9 | 16.7 | 6.2 | - |