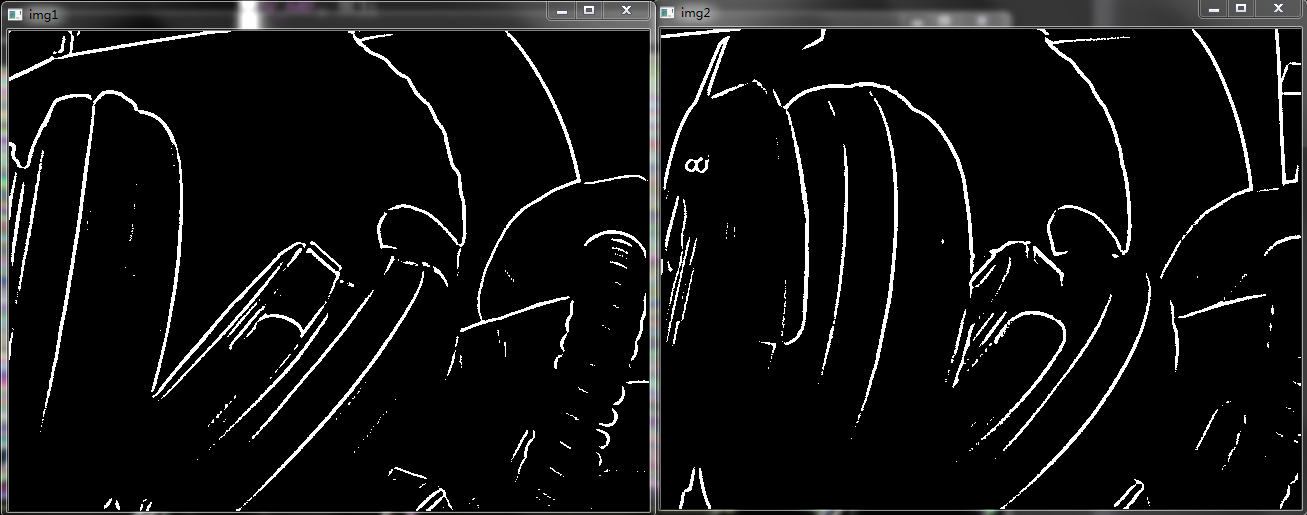
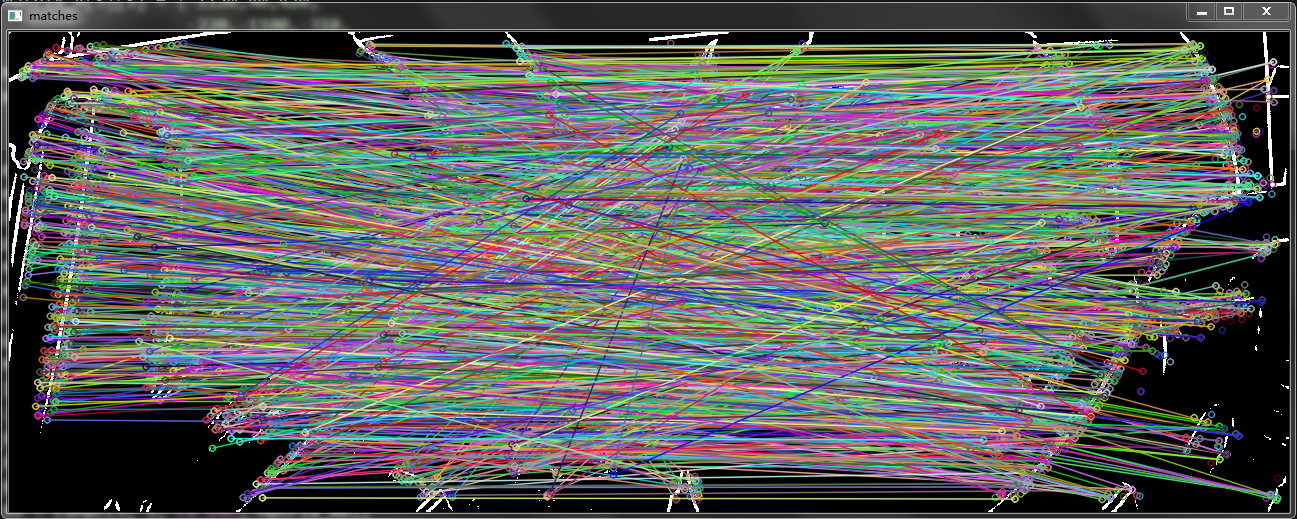
我的办法是对左右摄像机拍摄的图片进行滤波之后提取轮廓,使用SIFT算法获取了很多个匹配点,
我现在需要将这些匹配点恢复到世界坐标中
我使用的办法是,分别对左右摄像机进行单目摄像机标定,标定图片为15张,标定误差为0.31
然后获得左摄像机内参数矩阵 I,第一张标定图片的旋转矩阵Rl,第一张图片的平移向量Tl,然后 I*【Rl Tl】得到一个左摄像机的投影矩阵 Ml(我假定第一张标定图片的世界坐标为我三维重建之后的世界坐标)
同理再获得右摄像机的投影矩阵Mr
然后根据
Zc1 [ u1 , v1 , 1 ]^t = Ml[X,Y,Z,1]^T ①
Zc2 [ u2 , v2 , 1 ]^t = Mr[X,Y,Z,1]^T ②
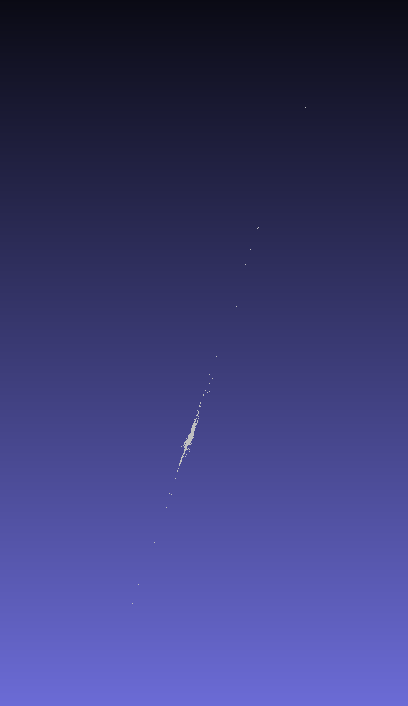
联立方程解得所有匹配点的三维坐标,但是并不成功,虽然获得了三维坐标,但是绘制出的三维点云表现为一条直线
下面是我的问题
(1)这种三维重建办法是否可行?
(2)我选取的旋转矩阵和平移向量是否恰当?
(3)我所得到的三维点云图在meshlab中表现为一根直线?并非我所用图像的轮廓




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享