285
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

| The Link Your Class | https://bbs.csdn.net/forums/MUEE308FZU202201 |
| The Link of Requirement of This Assignment | https://bbs.csdn.net/topics/608734618 |
| The Aim of This Assignment | Self Introduction & Course Planning |
| MU STU ID and FZU STU ID | MU:20124058 FZU:832001227 |
Catalogue
My name is WENQI PENG, major in Electronic Engineering (EE) in MIEC. What I like is to realize program with my team, it makes me excited and self-confident. In college, I learned a lot of novel knowledge, opened the way to write programs.
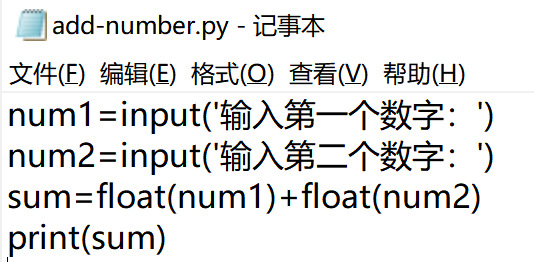
The first language I learned is Python, and of course, the first code is 'print("hello world")'. At that time using codes to solve problems is a really interesting thing for me.
The first program is to add number, which is simple but cool for me at that time.
With the deepening of the course, I learned more knowledge, such as object-oriented, C++, Arduino, and combined software and hardware to make automatic garden irrigation system and intelligent car.
1. what professional knowledge I have
*The use of SCM knowledge and C++ to do the intelligent freight car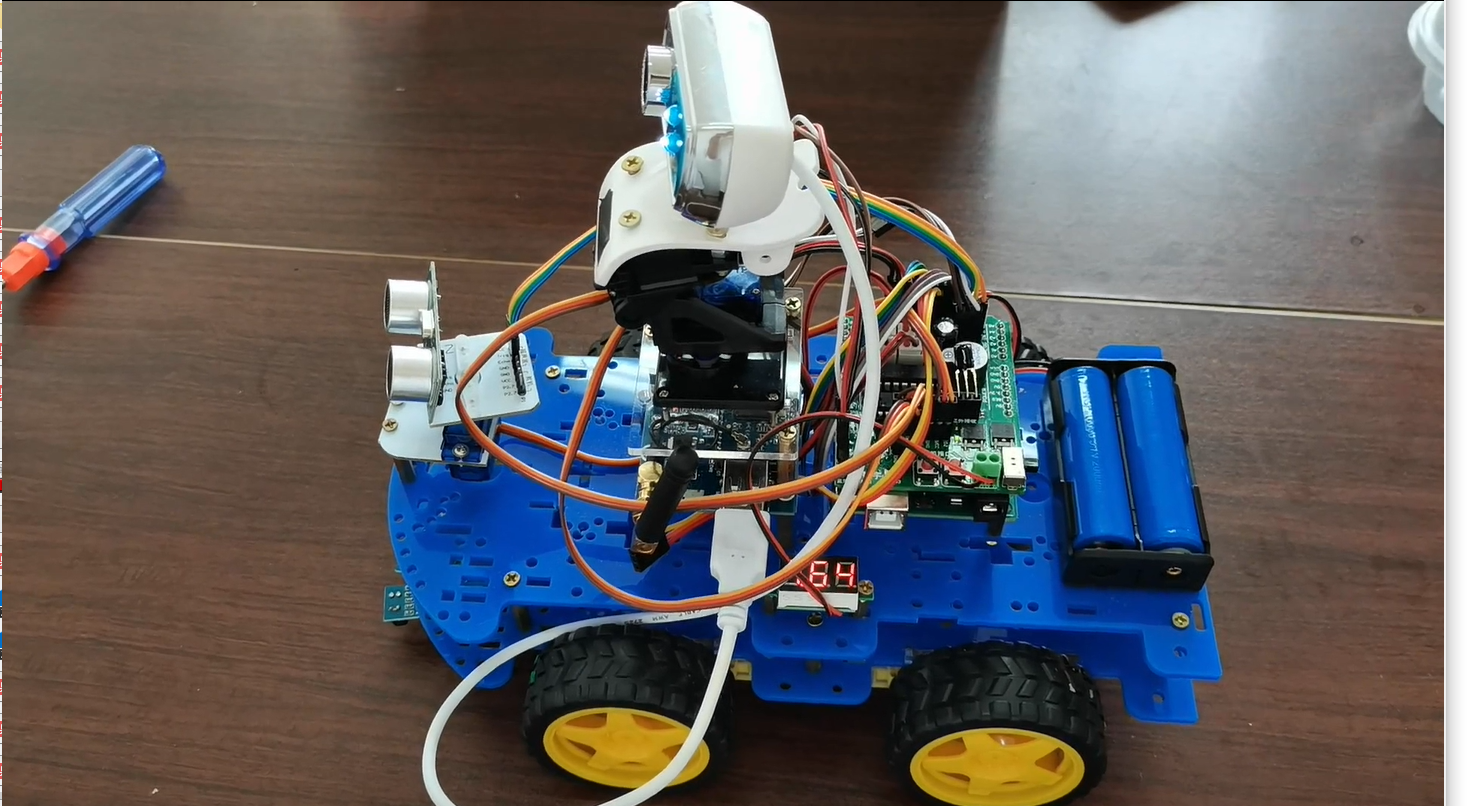
2.what kind of technical direction I am interested in
3.which ability I lack of
The ability of knowledge integration is slightly insufficient.
In fact, as each experiment and study went on, the number of code written could not be calculated clearly.
During the five semesters, the program was written almost every two days, and it was estimated that it had reached 50,000 lines. At the end of this course we hope to add another five thousand lines.
1.What I want to get in this course
In this course, I hope to know the process of software making and have the ability to develop a software together with a team.
2.Which role I want to play in this course
In the course of study, I hope to become a serious and hardworking student, a developer with outstanding ability, and a contributor to drive the team forward and guide the direction.