1,092
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

各位作者好,我在实车部署TARE规划器时遇到了下面一些问题,希望能给予解答
1、启动TARE,局部规划出来的路径(Topic为:/path)变化频率比较快,这也导致了车行走方式呈现走折线的状态。能不能通过更改参数减少路径规划的频率。
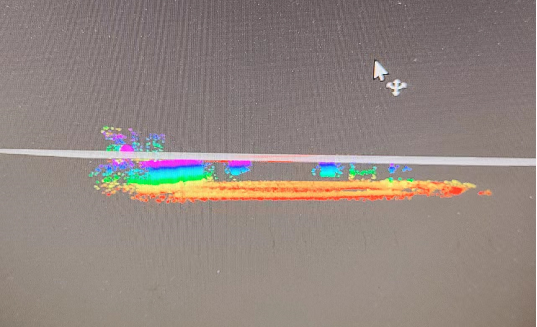
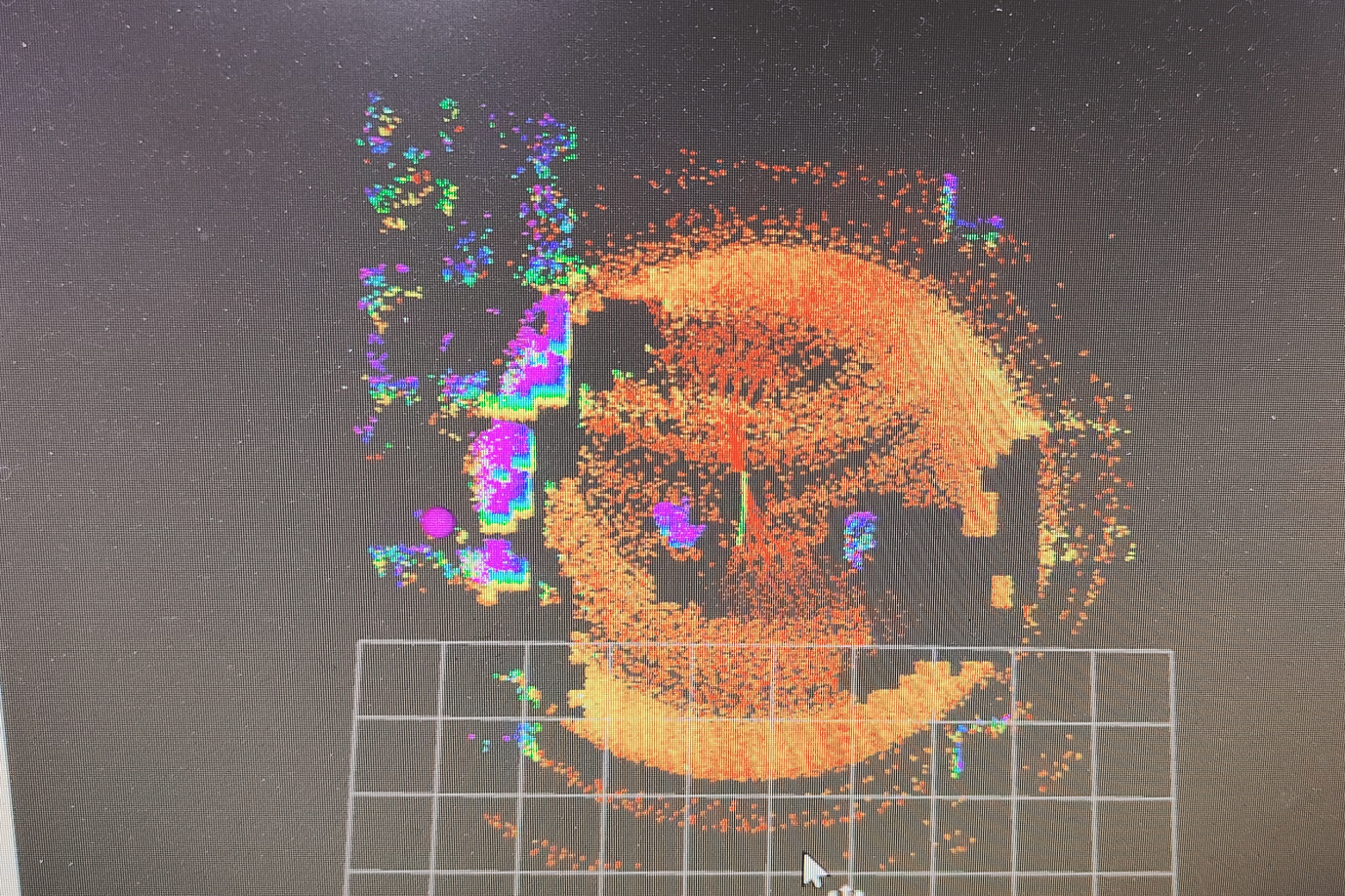
2、实车部署后Topic:/terrain_map的点云在rviz上显示大部分位于Grid网格以下,但是在仿真里面却是皆在Grid以上,请问这是怎么回事,该如何解决?
3、/way_point规划到障碍物外面的情况导致车来回原地旋转,如下图。这种情况该怎么解决?

你好,/path 变化快的问题可以看看是否是/way_point频繁跳动导致的。如果是的话可以看看是否是TARE规划出来的路径在频繁变化。理论上来说TARE规划出来的路径在1赫兹左右,而且在机器人附近区域的路径应该不会频分变动。如果有频分变动可能是其他的问题而不是规划频率过快导致的。
/terrain_map 在网格以下的问题:真机部署的时候世界坐标系的原点和state estimation初始的原点是重合的,初始的时候lidar所在地位置是(0,0,0),所以地面就会在网格平面(z=0的平面)以下。在虚拟环境中我们的时间坐标系原点设置在了地面上所以地平面会在网格平面上。这个差异应该不会对探索性能产生影响。
/way_point规划到障碍物外面:这个问题可以先检查一下/terrain_map 和state estimation输出对不对。理论上来说TARE会用/terrain_map确定可行驶区域,不会把/way_point放在不能到的地方。但如果/terrain_map 和state estimation输出有误,倒是障碍物没有被检测到则会出现这个问题。另外在小环境中可以尝试减小kExtendWayPointDistance,这样TARE就不会把目标点投影过远至不可到达的地方。